Voice Recognition Sensor Module
This tutorial will guide you how to use the sensor with MicroPython
YouTube Video
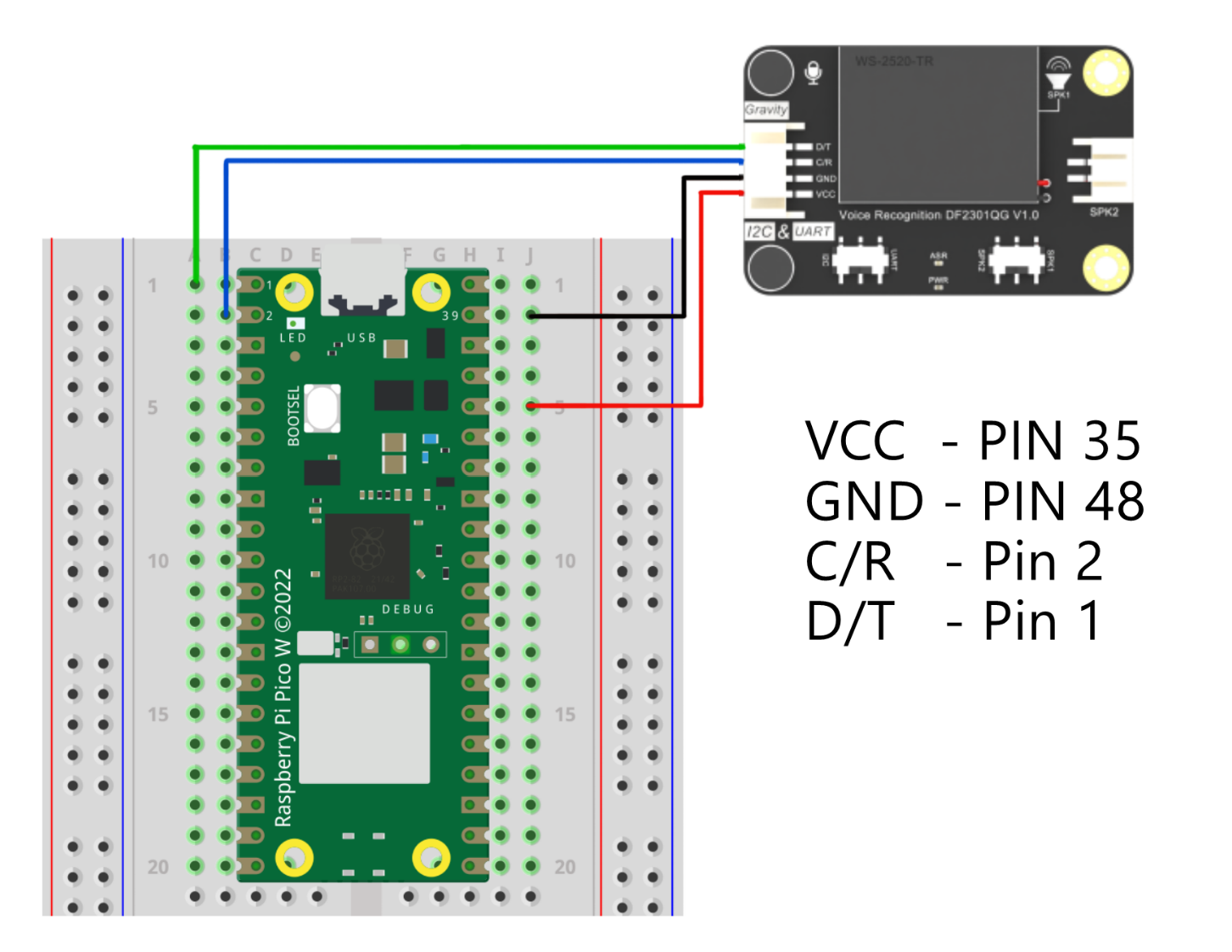
Schematic
Code
Library:
from micropython import const
from machine import I2C, Pin
from utime import sleep
DF2301Q_I2C_ADDR = const(0x64)
class DFRobot_DF2301Q_I2C:
"""
MicroPython class for communication with the DF2301Q from DFRobot via I2C
"""
DF2301Q_I2C_REG_CMDID = const(0x02)
DF2301Q_I2C_REG_PLAY_CMDID = const(0x03)
DF2301Q_I2C_REG_SET_MUTE = const(0x04)
DF2301Q_I2C_REG_SET_VOLUME = const(0x05)
DF2301Q_I2C_REG_WAKE_TIME = const(0x06)
DF2301Q_I2C_8BIT_RANGE = const(0xFF)
DF2301Q_I2C_PLAY_CMDID_DURATION = const(1)
def __init__(self, sda, scl, i2c_addr=DF2301Q_I2C_ADDR, i2c_bus=0):
"""
Initialize the DF2301Q I2C communication
:param sda: I2C SDA pin
:param scl: I2C SCL pin
:param i2c_addr: I2C address
:param i2c_bus: I2C bus number
"""
self._addr = i2c_addr
try:
self._i2c = I2C(i2c_bus, sda=Pin(sda), scl=Pin(scl))
except Exception as err:
print(f'Could not initialize i2c! bus: {i2c_bus}, sda: {sda}, scl: {scl}, error: {err}')
def _write_reg(self, reg, data) -> None:
"""
Writes data to the I2C register
:param reg: register address
:param data: data to write
:return: None
"""
if isinstance(data, int):
data = [data]
try:
self._i2c.writeto_mem(self._addr, reg, bytearray(data))
except Exception as err:
print(f'Write issue: {err}')
def _read_reg(self, reg, length) -> bytes:
"""
Reads data from the I2C register
:param reg: register address
:param length: number of bytes to read
:return: bytes or 0
"""
try:
result = self._i2c.readfrom_mem(self._addr, reg, length)
except Exception as err:
print(f'Read issue: {err}')
result = [0, 0]
return result
def get_cmdid(self) -> int:
"""
Returns the current command id
:return: int
"""
cmd = self._read_reg(self.DF2301Q_I2C_REG_CMDID, 1)
if type(cmd) == bytes:
return int.from_bytes(cmd, "big") # Change bytes to int
elif type(cmd) == list:
return 0 # Return 0 in case of read failure
def get_wake_time(self) -> int:
"""
Returns the current wake-up duration
:return: int
"""
return int(self._read_reg(self.DF2301Q_I2C_REG_WAKE_TIME, 1))
def play_by_cmdid(self, cmdid: int) -> None:
"""
Play the current command words by command id
:param cmdid: command words as integer
:return: None
"""
self._write_reg(self.DF2301Q_I2C_REG_PLAY_CMDID, int(cmdid))
sleep(self.DF2301Q_I2C_PLAY_CMDID_DURATION)
def set_wake_time(self, wake_time: int) -> None:
"""
Set the wake-up duration of the device
:param wake_time: integer between 0 and 255
:return: None
"""
wake_up_time = int(wake_time) & self.DF2301Q_I2C_8BIT_RANGE
self._write_reg(self.DF2301Q_I2C_REG_WAKE_TIME, wake_up_time)
def set_volume(self, vol: int) -> None:
"""
Set the volume of the device
:param vol: integer between 1 and 7
:return: None
"""
self._write_reg(self.DF2301Q_I2C_REG_SET_VOLUME, int(vol))
def set_mute_mode(self, mode) -> None:
"""
Set the mute mode of the device
:param mode: integer 0 for off, 1 for on
:return: None
"""
self._write_reg(self.DF2301Q_I2C_REG_SET_MUTE, int(bool(mode)))
Template
from DFRobot_DF2301Q_I2C import DFRobot_DF2301Q_I2C
from micropython import const
from utime import sleep
SDA_PIN = const(0)
SCL_PIN = const(1)
SLEEP_SECONDS = const(3)
def setup(sensor) -> None:
"""
Set up the DFRobot DF2301Q sensor
:param sensor: instance of DFRobot_DF2301Q_I2C
:return: None
"""
sensor.set_volume(10)
sensor.set_mute_mode(0)
sensor.set_wake_time(20)
def get_cmd_id(sensor) -> int:
"""
Get the command id from the DF2301Q sensor
:param sensor: instance of DFRobot_DF2301Q_I2C
:return: int
"""
command_id = sensor.get_cmdid()
if command_id != 0:
return int(command_id)
if __name__ == "__main__":
voice_sensor = DFRobot_DF2301Q_I2C(sda=SDA_PIN, scl=SCL_PIN)
setup(sensor=voice_sensor)
print('Speak your commands:')
while True:
cmd_id = get_cmd_id(sensor=voice_sensor)
if isinstance(cmd_id, int):
print(f'COMMAND ID: {cmd_id}')
sleep(SLEEP_SECONDS)