Waveshare - Pico-ePaper 4.2
Introduction
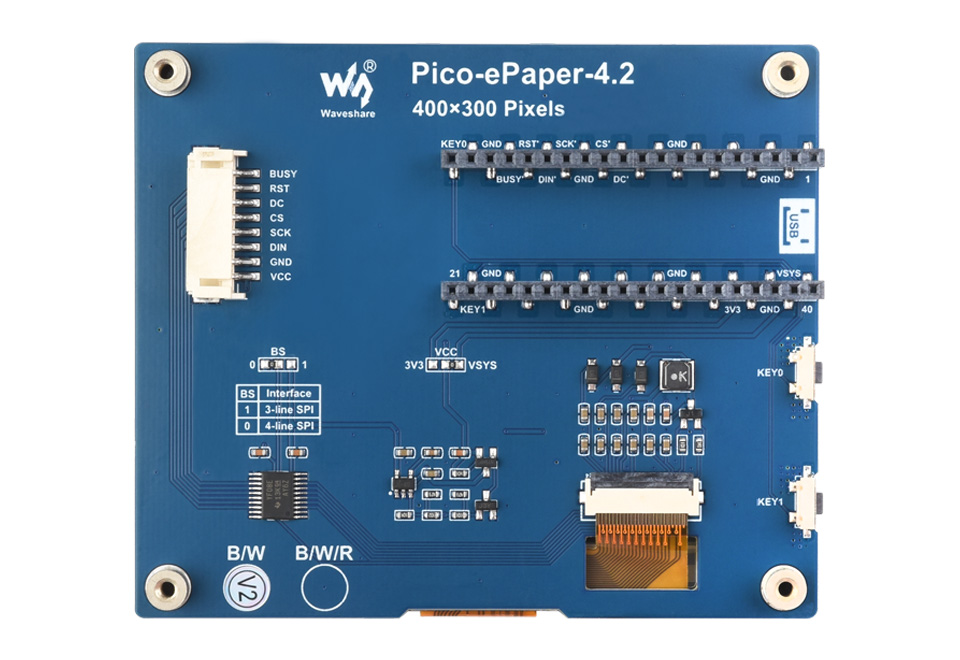
I bought this 4.2inch E-Paper E-Ink Display Module for Raspberry Pi Pico, 400×300, Black / White, 4 Grayscale, SPI from Waveshare as to be used a custom badge for future maker events. The display comes with many great features:
- No backlight, keeps displaying last content for a long time even when power down
- Ultra low power consumption, basically power is only required for refreshing
- SPI interface, requires minimal IO pins
- Onboard voltage translator, compatible with 3.3V / 5V MCUs
- 2x user buttons for easy interacting
The one main advantage of E-Paper Display over OLED or LCD are that E-paper display will clearly display images/texts under lamplight or natural light, requires no backlight, and features nearly up to 180° viewing angle.
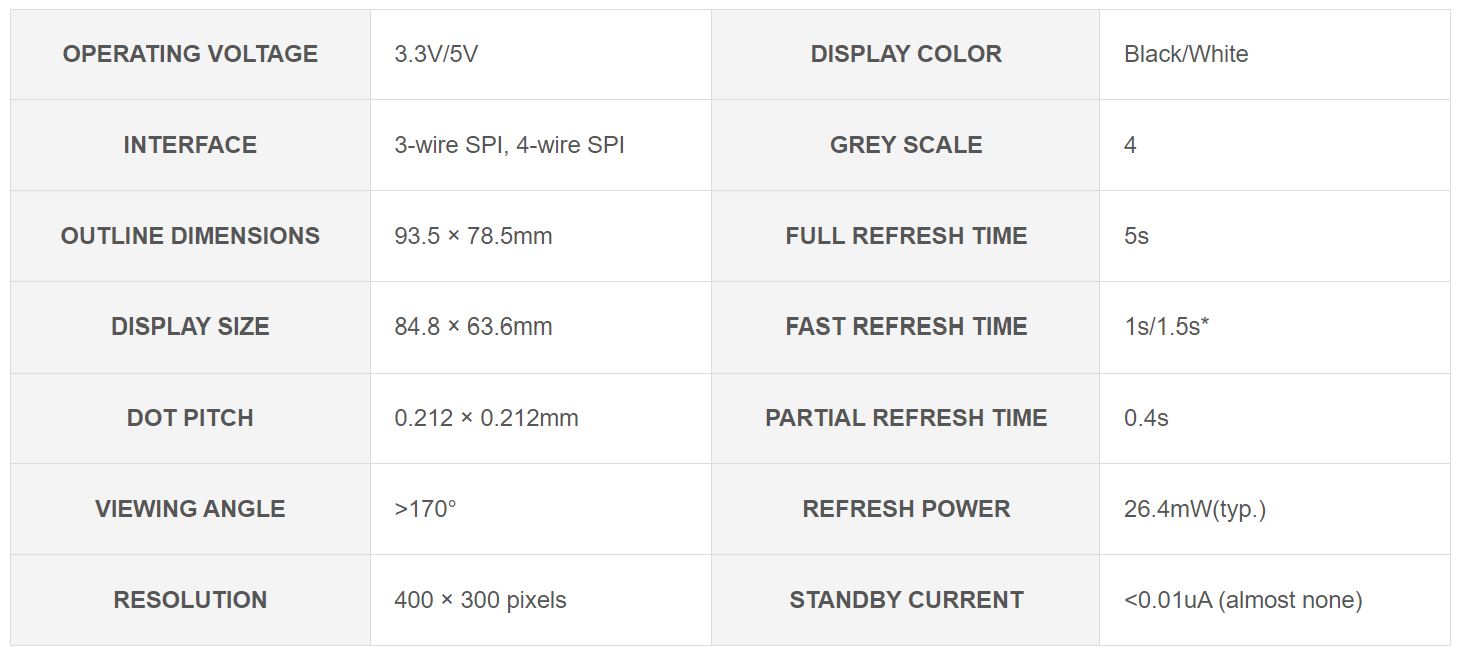
E-paper Module Specifications
I included the specifications given by Waveshare below:
The board has an onboard SPI control interface which makes it easy to use with other controllers.
Coding
To get the Display to work on MicroPython a library with examples are given from Waveshare, but to make things less complicated I modified the library. We will go through each example below.
Waveshare Demo
The following library is from Waveshare and no changes was made. Copy the library and save it to the Pico as e_inkv2_library.py
Library
# *****************************************************************************
# * | File : epd4in2_V2.py
# * | Author : Waveshare team
# * | Function : Electronic paper driver
# * | Info :
# *----------------
# * | This version: V1.0
# * | Date : 2023-09-13
# # | Info : python demo
# -----------------------------------------------------------------------------
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documnetation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS OR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
#
from machine import Pin, SPI
import framebuf
import utime
# Display resolution
EPD_WIDTH = 400
EPD_HEIGHT = 300
RST_PIN = 12
DC_PIN = 8
CS_PIN = 9
BUSY_PIN = 13
LUT_ALL=[ 0x01, 0x0A, 0x1B, 0x0F, 0x03, 0x01, 0x01,
0x05, 0x0A, 0x01, 0x0A, 0x01, 0x01, 0x01,
0x05, 0x08, 0x03, 0x02, 0x04, 0x01, 0x01,
0x01, 0x04, 0x04, 0x02, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x0A, 0x1B, 0x0F, 0x03, 0x01, 0x01,
0x05, 0x4A, 0x01, 0x8A, 0x01, 0x01, 0x01,
0x05, 0x48, 0x03, 0x82, 0x84, 0x01, 0x01,
0x01, 0x84, 0x84, 0x82, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x0A, 0x1B, 0x8F, 0x03, 0x01, 0x01,
0x05, 0x4A, 0x01, 0x8A, 0x01, 0x01, 0x01,
0x05, 0x48, 0x83, 0x82, 0x04, 0x01, 0x01,
0x01, 0x04, 0x04, 0x02, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x8A, 0x1B, 0x8F, 0x03, 0x01, 0x01,
0x05, 0x4A, 0x01, 0x8A, 0x01, 0x01, 0x01,
0x05, 0x48, 0x83, 0x02, 0x04, 0x01, 0x01,
0x01, 0x04, 0x04, 0x02, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x8A, 0x9B, 0x8F, 0x03, 0x01, 0x01,
0x05, 0x4A, 0x01, 0x8A, 0x01, 0x01, 0x01,
0x05, 0x48, 0x03, 0x42, 0x04, 0x01, 0x01,
0x01, 0x04, 0x04, 0x42, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x01, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x02, 0x00, 0x00, 0x07, 0x17, 0x41, 0xA8,
0x32, 0x30 ]
class EPD_4in2:
def __init__(self):
self.reset_pin = Pin(RST_PIN, Pin.OUT)
self.busy_pin = Pin(BUSY_PIN, Pin.IN, Pin.PULL_UP)
self.cs_pin = Pin(CS_PIN, Pin.OUT)
self.width = EPD_WIDTH
self.height = EPD_HEIGHT
self.Seconds_1_5S = 0
self.Seconds_1S = 1
self.LUT_ALL = LUT_ALL
self.black = 0x00
self.white = 0xff
self.darkgray = 0xaa
self.grayish = 0x55
self.spi = SPI(1)
self.spi.init(baudrate=4000_000)
self.dc_pin = Pin(DC_PIN, Pin.OUT)
self.buffer_1Gray = bytearray(self.height * self.width // 8)
self.buffer_4Gray = bytearray(self.height * self.width // 4)
self.image1Gray = framebuf.FrameBuffer(self.buffer_1Gray, self.width, self.height, framebuf.MONO_HLSB)
self.image4Gray = framebuf.FrameBuffer(self.buffer_4Gray, self.width, self.height, framebuf.GS2_HMSB)
self.EPD_4IN2_V2_Init()
self.EPD_4IN2_V2_Clear()
utime.sleep_ms(500)
def digital_write(self, pin, value):
pin.value(value)
def digital_read(self, pin):
return pin.value()
def delay_ms(self, delaytime):
utime.sleep(delaytime / 1000.0)
def spi_writebyte(self, data):
self.spi.write(bytearray(data))
def module_exit(self):
self.digital_write(self.reset_pin, 0)
# Hardware reset
def reset(self):
self.digital_write(self.reset_pin, 1)
self.delay_ms(20)
self.digital_write(self.reset_pin, 0)
self.delay_ms(2)
self.digital_write(self.reset_pin, 1)
self.delay_ms(20)
self.digital_write(self.reset_pin, 0)
self.delay_ms(2)
self.digital_write(self.reset_pin, 1)
self.delay_ms(20)
self.digital_write(self.reset_pin, 0)
self.delay_ms(2)
self.digital_write(self.reset_pin, 1)
self.delay_ms(20)
def send_command(self, command):
self.digital_write(self.dc_pin, 0)
self.digital_write(self.cs_pin, 0)
self.spi_writebyte([command])
self.digital_write(self.cs_pin, 1)
def send_data(self, data):
self.digital_write(self.dc_pin, 1)
self.digital_write(self.cs_pin, 0)
self.spi_writebyte([data])
self.digital_write(self.cs_pin, 1)
def send_data1(self, buf):
self.digital_write(self.dc_pin, 1)
self.digital_write(self.cs_pin, 0)
self.spi.write(bytearray(buf))
self.digital_write(self.cs_pin, 1)
def ReadBusy(self):
print("e-Paper busy")
while(self.digital_read(self.busy_pin) == 1): # LOW: idle, HIGH: busy
self.delay_ms(100)
print("e-Paper busy release")
def TurnOnDisplay(self):
self.send_command(0x22) #Display Update Control
self.send_data(0xF7)
self.send_command(0x20) #Activate Display Update Sequence
self.ReadBusy()
def TurnOnDisplay_Fast(self):
self.send_command(0x22) #Display Update Control
self.send_data(0xC7)
self.send_command(0x20) #Activate Display Update Sequence
self.ReadBusy()
def TurnOnDisplay_Partial(self):
self.send_command(0x22) #Display Update Control
self.send_data(0xFF)
self.send_command(0x20) #Activate Display Update Sequence
self.ReadBusy()
def TurnOnDisplay_4GRAY(self):
self.send_command(0x22) #Display Update Control
self.send_data(0xCF)
self.send_command(0x20) #Activate Display Update Sequence
self.ReadBusy()
def EPD_4IN2_V2_Init(self):
# EPD hardware init start
self.reset()
self.ReadBusy()
self.send_command(0x12) #SWRESET
self.ReadBusy()
self.send_command(0x21) # Display update control
self.send_data(0x40)
self.send_data(0x00)
self.send_command(0x3C) # BorderWavefrom
self.send_data(0x05)
self.send_command(0x11) # data entry mode
self.send_data(0x03) # X-mode
self.send_command(0x44)
self.send_data(0x00)
self.send_data(0x31)
self.send_command(0x45)
self.send_data(0x00)
self.send_data(0x00)
self.send_data(0x2B)
self.send_data(0x01)
self.send_command(0x4E)
self.send_data(0x00)
self.send_command(0x4F)
self.send_data(0x00)
self.send_data(0x00)
self.ReadBusy()
def EPD_4IN2_V2_Init_Fast(self, mode):
self.reset()
self.ReadBusy()
self.send_command(0x12) #SWRESET
self.ReadBusy()
self.send_command(0x21) # Display update control
self.send_data(0x40)
self.send_data(0x00)
self.send_command(0x3C) # BorderWavefrom
self.send_data(0x05)
if mode == self.Seconds_1_5S:
self.send_command(0x1A)
self.send_data(0x6E)
else :
self.send_command(0x1A)
self.send_data(0x5A)
self.send_command(0x22) # Load temperature value
self.send_data(0x91)
self.send_command(0x20)
self.ReadBusy()
self.send_command(0x11) # data entry mode
self.send_data(0x03) # X-mode
self.send_command(0x44)
self.send_data(0x00)
self.send_data(0x31)
self.send_command(0x45)
self.send_data(0x00)
self.send_data(0x00)
self.send_data(0x2B)
self.send_data(0x01)
self.send_command(0x4E)
self.send_data(0x00)
self.send_command(0x4F)
self.send_data(0x00)
self.send_data(0x00)
self.ReadBusy()
def Lut(self):
self.send_command(0x32)
for i in range(227):
self.send_data(self.LUT_ALL[i])
self.send_command(0x3F)
self.send_data(self.LUT_ALL[227])
self.send_command(0x03)
self.send_data(self.LUT_ALL[228])
self.send_command(0x04)
self.send_data(self.LUT_ALL[229])
self.send_data(self.LUT_ALL[230])
self.send_data(self.LUT_ALL[231])
self.send_command(0x2c)
self.send_data(self.LUT_ALL[232])
def EPD_4IN2_V2_Init_4Gray(self):
# EPD hardware init start
self.reset()
self.ReadBusy()
self.send_command(0x12) #SWRESET
self.ReadBusy()
self.send_command(0x21) # Display update control
self.send_data(0x00)
self.send_data(0x00)
self.send_command(0x3C) # BorderWavefrom
self.send_data(0x03)
self.send_command(0x0C) # BTST
self.send_data(0x8B) # 8B
self.send_data(0x9C) # 9C
self.send_data(0xA4) # 96 A4
self.send_data(0x0F) # 0F
self.Lut()
self.send_command(0x11) # data entry mode
self.send_data(0x03) # X-mode
self.send_command(0x44)
self.send_data(0x00)
self.send_data(0x31)
self.send_command(0x45)
self.send_data(0x00)
self.send_data(0x00)
self.send_data(0x2B)
self.send_data(0x01)
self.send_command(0x4E)
self.send_data(0x00)
self.send_command(0x4F)
self.send_data(0x00)
self.send_data(0x00)
self.ReadBusy()
def EPD_4IN2_V2_Clear(self):
high = self.height
if( self.width % 8 == 0) :
wide = self.width // 8
else :
wide = self.width // 8 + 1
self.send_command(0x24)
for i in range(0, wide):
self.send_data1([0xff] * high)
self.send_command(0x26)
for i in range(0, wide):
self.send_data1([0xff] * high)
self.TurnOnDisplay()
def EPD_4IN2_V2_Display(self,Image):
self.send_command(0x24)
self.send_data1(Image)
self.send_command(0x26)
self.send_data1(Image)
self.TurnOnDisplay()
def EPD_4IN2_V2_Display_Fast(self, image):
self.send_command(0x24)
self.send_data1(image)
self.send_command(0x26)
self.send_data1(image)
self.TurnOnDisplay_Fast()
def EPD_4IN2_V2_PartialDisplay(self, Image):
self.send_command(0x3C) # BorderWavefrom
self.send_data(0x80)
self.send_command(0x21) # Display update control
self.send_data(0x00)
self.send_data(0x00)
self.send_command(0x3C) # BorderWavefrom
self.send_data(0x80)
self.send_command(0x44)
self.send_data(0x00)
self.send_data(0x31)
self.send_command(0x45)
self.send_data(0x00)
self.send_data(0x00)
self.send_data(0x2B)
self.send_data(0x01)
self.send_command(0x4E)
self.send_data(0x00)
self.send_command(0x4F)
self.send_data(0x00)
self.send_data(0x00)
self.send_command(0x24) # WRITE_RAM
self.send_data1(Image)
self.TurnOnDisplay_Partial()
def EPD_4IN2_V2_4GrayDisplay(self,Image):
self.send_command(0x24)
for i in range(0, 15000):
temp3=0
for j in range(0, 2):
temp1 = Image[i*2+j]
for k in range(0, 2):
temp2 = temp1&0x03
if(temp2 == 0x03):
temp3 |= 0x01 # white
elif(temp2 == 0x00):
temp3 |= 0x00 # black
elif(temp2 == 0x02):
temp3 |= 0x01 # gray1
else: # 0x01
temp3 |= 0x00 # gray2
temp3 <<= 1
temp1 >>= 2
temp2 = temp1&0x03
if(temp2 == 0x03): # white
temp3 |= 0x01
elif(temp2 == 0x00): # black
temp3 |= 0x00
elif(temp2 == 0x02):
temp3 |= 0x01 # gray1
else: # 0x01
temp3 |= 0x00 # gray2
if (( j!=1 ) | ( k!=1 )):
temp3 <<= 1
temp1 >>= 2
self.send_data(temp3)
self.send_command(0x26)
for i in range(0, 15000):
temp3=0
for j in range(0, 2):
temp1 = Image[i*2+j]
for k in range(0, 2):
temp2 = temp1&0x03
if(temp2 == 0x03):
temp3 |= 0x01 # white
elif(temp2 == 0x00):
temp3 |= 0x00 # black
elif(temp2 == 0x02):
temp3 |= 0x00 # gray1
else: # 0x01
temp3 |= 0x01 # gray2
temp3 <<= 1
temp1 >>= 2
temp2 = temp1&0x03
if(temp2 == 0x03): # white
temp3 |= 0x01
elif(temp2 == 0x00): # black
temp3 |= 0x00
elif(temp2 == 0x02):
temp3 |= 0x00 # gray1
else: # 0x01
temp3 |= 0x01 # gray2
if (( j!=1 ) | ( k!=1 )):
temp3 <<= 1
temp1 >>= 2
self.send_data(temp3)
self.TurnOnDisplay_4GRAY()
def Sleep(self):
self.send_command(0x10) # DEEP_SLEEP
self.send_data(0x01)
Demo
import utime
from e_inkv2_library import EPD_4in2
EPD_WIDTH = 400
EPD_HEIGHT = 300
if __name__=='__main__':
epd = EPD_4in2()
epd.image1Gray.fill(0xff)
epd.image4Gray.fill(0xff)
print("Full brush")
epd.EPD_4IN2_V2_Init()
epd.image1Gray.text("Waveshare", 5, 10, epd.black)
epd.image1Gray.text("Pico_ePaper-4.2", 5, 40, epd.black)
epd.image1Gray.text("Raspberry Pico", 5, 70, epd.black)
epd.EPD_4IN2_V2_Display(epd.buffer_1Gray)
epd.delay_ms(2000)
epd.image1Gray.vline(10, 90, 60, epd.black)
epd.image1Gray.vline(90, 90, 60, epd.black)
epd.image1Gray.hline(10, 90, 80, epd.black)
epd.image1Gray.hline(10, 150, 80, epd.black)
epd.image1Gray.line(10, 90, 90, 150, epd.black)
epd.image1Gray.line(90, 90, 10, 150, epd.black)
epd.EPD_4IN2_V2_Display(epd.buffer_1Gray)
epd.delay_ms(2000)
print("Quick refresh")
epd.EPD_4IN2_V2_Init_Fast(epd.Seconds_1_5S)
epd.image1Gray.rect(10, 180, 50, 80, epd.black)
epd.image1Gray.fill_rect(70, 180, 50, 80, epd.black)
epd.EPD_4IN2_V2_Display_Fast(epd.buffer_1Gray)
epd.delay_ms(2000)
print("partial refresh")
for i in range(0, 10):
print(str(i))
epd.image1Gray.fill_rect(60, 270, 10, 10, epd.white)
epd.image1Gray.text(str(i), 62, 272, epd.black)
epd.EPD_4IN2_V2_PartialDisplay(epd.buffer_1Gray)
epd.delay_ms(500)
print("Four grayscale refresh")
epd.EPD_4IN2_V2_Init_4Gray()
epd.image4Gray.fill_rect(150, 10, 250, 30, epd.black)
epd.image4Gray.text('GRAY1 with black background',155, 21, epd.white)
epd.image4Gray.text('GRAY2 with white background',155, 51, epd.grayish)
epd.image4Gray.text('GRAY3 with white background',155, 81, epd.darkgray)
epd.image4Gray.text('GRAY4 with white background',155, 111, epd.black)
epd.EPD_4IN2_V2_4GrayDisplay(epd.buffer_4Gray)
epd.delay_ms(5000)
print("Clear")
epd.EPD_4IN2_V2_Init()
epd.EPD_4IN2_V2_Clear()
print("Enter sleep mode ")
epd.Sleep()
Image Display Library
Download the following code for the image demo: Link