MPU-6050
Introduction
The MPU-6050 is a motion sensor module that combines two sensors in one board:
- a 3-axis accelerometer
- a 3-axis gyroscope
That means it can measure both:
- linear acceleration
- rotational movement
This makes it useful for:
- balancing projects
- robots
- gesture input
- movement tracking
- tilt detection
The MPU-6050 communicates over I2C, so it only needs a few wires to connect to the Raspberry Pi Pico.
Components Needed
| Component | Quantity |
|---|---|
| Raspberry Pi Pico or Pico W | 1 |
| Micro USB cable | 1 |
| Breadboard | 1 |
| Jumper wires | Several |
| MPU-6050 module | 1 |
Fritzing Diagram
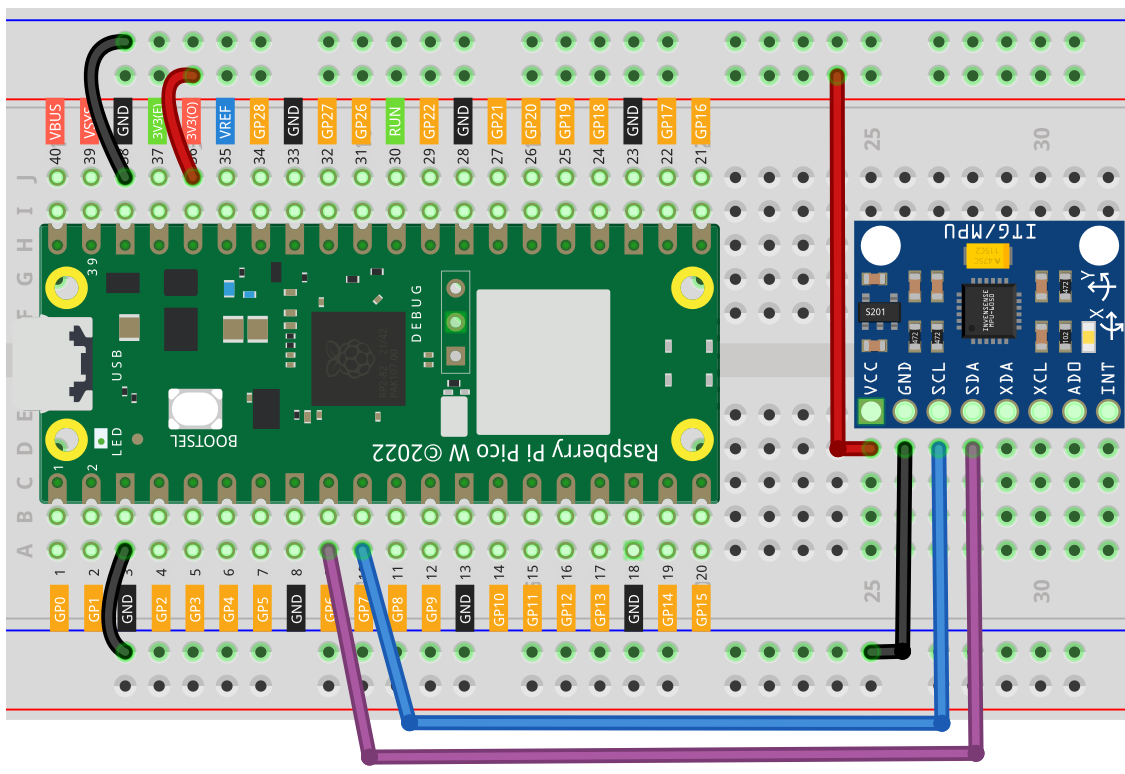
Wiring Notes
Typical MPU-6050 pins:
VCCGNDSCLSDA
Example Pico wiring used in this tutorial:
SDA -> GP6SCL -> GP7VCC -> 3.3VGND -> GND
Library
This example uses:
from imu import MPU6050
To make this easier to copy, here is the imu.py library code exactly as used by this tutorial:
# imu.py MicroPython driver for the InvenSense inertial measurement units
# This is the base class
# Adapted from Sebastian Plamauer's MPU9150 driver:
# https://github.com/micropython-IMU/micropython-mpu9150.git
# Authors Peter Hinch, Sebastian Plamauer
# V0.2 17th May 2017 Platform independent: utime and machine replace pyb
'''
mpu9250 is a micropython module for the InvenSense MPU9250 sensor.
It measures acceleration, turn rate and the magnetic field in three axis.
mpu9150 driver modified for the MPU9250 by Peter Hinch
The MIT License (MIT)
Copyright (c) 2014 Sebastian Plamauer, oeplse@gmail.com, Peter Hinch
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
'''
# User access is now by properties e.g.
# myimu = MPU9250('X')
# magx = myimu.mag.x
# accelxyz = myimu.accel.xyz
# Error handling: on code used for initialisation, abort with message
# At runtime try to continue returning last good data value. We don't want aircraft
# crashing. However if the I2C has crashed we're probably stuffed.
from utime import sleep_ms
from machine import I2C
from vector3d import Vector3d
class MPUException(OSError):
'''
Exception for MPU devices
'''
pass
def bytes_toint(msb, lsb):
'''
Convert two bytes to signed integer (big endian)
for little endian reverse msb, lsb arguments
Can be used in an interrupt handler
'''
if not msb & 0x80:
return msb << 8 | lsb # +ve
return - (((msb ^ 255) << 8) | (lsb ^ 255) + 1)
class MPU6050(object):
'''
Module for InvenSense IMUs. Base class implements MPU6050 6DOF sensor, with
features common to MPU9150 and MPU9250 9DOF sensors.
'''
_I2Cerror = "I2C failure when communicating with IMU"
_mpu_addr = (104, 105) # addresses of MPU9150/MPU6050. There can be two devices
_chip_id = 104
def __init__(self, side_str, device_addr=None, transposition=(0, 1, 2), scaling=(1, 1, 1)):
self._accel = Vector3d(transposition, scaling, self._accel_callback)
self._gyro = Vector3d(transposition, scaling, self._gyro_callback)
self.buf1 = bytearray(1) # Pre-allocated buffers for reads: allows reads to
self.buf2 = bytearray(2) # be done in interrupt handlers
self.buf3 = bytearray(3)
self.buf6 = bytearray(6)
sleep_ms(200) # Ensure PSU and device have settled
if isinstance(side_str, str): # Non-pyb targets may use other than X or Y
self._mpu_i2c = I2C(side_str)
elif hasattr(side_str, 'readfrom'): # Soft or hard I2C instance. See issue #3097
self._mpu_i2c = side_str
else:
raise ValueError("Invalid I2C instance")
if device_addr is None:
devices = set(self._mpu_i2c.scan())
mpus = devices.intersection(set(self._mpu_addr))
number_of_mpus = len(mpus)
if number_of_mpus == 0:
raise MPUException("No MPU's detected")
elif number_of_mpus == 1:
self.mpu_addr = mpus.pop()
else:
raise ValueError("Two MPU's detected: must specify a device address")
else:
if device_addr not in (0, 1):
raise ValueError('Device address must be 0 or 1')
self.mpu_addr = self._mpu_addr[device_addr]
self.chip_id # Test communication by reading chip_id: throws exception on error
# Can communicate with chip. Set it up.
self.wake() # wake it up
self.passthrough = True # Enable mag access from main I2C bus
self.accel_range = 0 # default to highest sensitivity
self.gyro_range = 0 # Likewise for gyro
# read from device
def _read(self, buf, memaddr, addr): # addr = I2C device address, memaddr = memory location within the I2C device
'''
Read bytes to pre-allocated buffer Caller traps OSError.
'''
self._mpu_i2c.readfrom_mem_into(addr, memaddr, buf)
# write to device
def _write(self, data, memaddr, addr):
'''
Perform a memory write. Caller should trap OSError.
'''
self.buf1[0] = data
self._mpu_i2c.writeto_mem(addr, memaddr, self.buf1)
# wake
def wake(self):
'''
Wakes the device.
'''
try:
self._write(0x01, 0x6B, self.mpu_addr) # Use best clock source
except OSError:
raise MPUException(self._I2Cerror)
return 'awake'
# mode
def sleep(self):
'''
Sets the device to sleep mode.
'''
try:
self._write(0x40, 0x6B, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
return 'asleep'
# chip_id
@property
def chip_id(self):
'''
Returns Chip ID
'''
try:
self._read(self.buf1, 0x75, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
chip_id = int(self.buf1[0])
if chip_id != self._chip_id:
raise ValueError('Bad chip ID retrieved: MPU communication failure')
return chip_id
@property
def sensors(self):
'''
returns sensor objects accel, gyro
'''
return self._accel, self._gyro
# get temperature
@property
def temperature(self):
'''
Returns the temperature in degree C.
'''
try:
self._read(self.buf2, 0x41, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
return bytes_toint(self.buf2[0], self.buf2[1])/340 + 35 # I think
# passthrough
@property
def passthrough(self):
'''
Returns passthrough mode True or False
'''
try:
self._read(self.buf1, 0x37, self.mpu_addr)
return self.buf1[0] & 0x02 > 0
except OSError:
raise MPUException(self._I2Cerror)
@passthrough.setter
def passthrough(self, mode):
'''
Sets passthrough mode True or False
'''
if type(mode) is bool:
val = 2 if mode else 0
try:
self._write(val, 0x37, self.mpu_addr) # I think this is right.
self._write(0x00, 0x6A, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
else:
raise ValueError('pass either True or False')
# sample rate. Not sure why you'd ever want to reduce this from the default.
@property
def sample_rate(self):
'''
Get sample rate as per Register Map document section 4.4
SAMPLE_RATE= Internal_Sample_Rate / (1 + rate)
default rate is zero i.e. sample at internal rate.
'''
try:
self._read(self.buf1, 0x19, self.mpu_addr)
return self.buf1[0]
except OSError:
raise MPUException(self._I2Cerror)
@sample_rate.setter
def sample_rate(self, rate):
'''
Set sample rate as per Register Map document section 4.4
'''
if rate < 0 or rate > 255:
raise ValueError("Rate must be in range 0-255")
try:
self._write(rate, 0x19, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
# Low pass filters. Using the filter_range property of the MPU9250 is
# harmless but gyro_filter_range is preferred and offers an extra setting.
@property
def filter_range(self):
'''
Returns the gyro and temperature sensor low pass filter cutoff frequency
Pass: 0 1 2 3 4 5 6
Cutoff (Hz): 250 184 92 41 20 10 5
Sample rate (KHz): 8 1 1 1 1 1 1
'''
try:
self._read(self.buf1, 0x1A, self.mpu_addr)
res = self.buf1[0] & 7
except OSError:
raise MPUException(self._I2Cerror)
return res
@filter_range.setter
def filter_range(self, filt):
'''
Sets the gyro and temperature sensor low pass filter cutoff frequency
Pass: 0 1 2 3 4 5 6
Cutoff (Hz): 250 184 92 41 20 10 5
Sample rate (KHz): 8 1 1 1 1 1 1
'''
# set range
if filt in range(7):
try:
self._write(filt, 0x1A, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
else:
raise ValueError('Filter coefficient must be between 0 and 6')
# accelerometer range
@property
def accel_range(self):
'''
Accelerometer range
Value: 0 1 2 3
for range +/-: 2 4 8 16 g
'''
try:
self._read(self.buf1, 0x1C, self.mpu_addr)
ari = self.buf1[0]//8
except OSError:
raise MPUException(self._I2Cerror)
return ari
@accel_range.setter
def accel_range(self, accel_range):
'''
Set accelerometer range
Pass: 0 1 2 3
for range +/-: 2 4 8 16 g
'''
ar_bytes = (0x00, 0x08, 0x10, 0x18)
if accel_range in range(len(ar_bytes)):
try:
self._write(ar_bytes[accel_range], 0x1C, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
else:
raise ValueError('accel_range can only be 0, 1, 2 or 3')
# gyroscope range
@property
def gyro_range(self):
'''
Gyroscope range
Value: 0 1 2 3
for range +/-: 250 500 1000 2000 degrees/second
'''
# set range
try:
self._read(self.buf1, 0x1B, self.mpu_addr)
gri = self.buf1[0]//8
except OSError:
raise MPUException(self._I2Cerror)
return gri
@gyro_range.setter
def gyro_range(self, gyro_range):
'''
Set gyroscope range
Pass: 0 1 2 3
for range +/-: 250 500 1000 2000 degrees/second
'''
gr_bytes = (0x00, 0x08, 0x10, 0x18)
if gyro_range in range(len(gr_bytes)):
try:
self._write(gr_bytes[gyro_range], 0x1B, self.mpu_addr) # Sets fchoice = b11 which enables filter
except OSError:
raise MPUException(self._I2Cerror)
else:
raise ValueError('gyro_range can only be 0, 1, 2 or 3')
# Accelerometer
@property
def accel(self):
'''
Acceleremoter object
'''
return self._accel
def _accel_callback(self):
'''
Update accelerometer Vector3d object
'''
try:
self._read(self.buf6, 0x3B, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
self._accel._ivector[0] = bytes_toint(self.buf6[0], self.buf6[1])
self._accel._ivector[1] = bytes_toint(self.buf6[2], self.buf6[3])
self._accel._ivector[2] = bytes_toint(self.buf6[4], self.buf6[5])
scale = (16384, 8192, 4096, 2048)
self._accel._vector[0] = self._accel._ivector[0]/scale[self.accel_range]
self._accel._vector[1] = self._accel._ivector[1]/scale[self.accel_range]
self._accel._vector[2] = self._accel._ivector[2]/scale[self.accel_range]
def get_accel_irq(self):
'''
For use in interrupt handlers. Sets self._accel._ivector[] to signed
unscaled integer accelerometer values
'''
self._read(self.buf6, 0x3B, self.mpu_addr)
self._accel._ivector[0] = bytes_toint(self.buf6[0], self.buf6[1])
self._accel._ivector[1] = bytes_toint(self.buf6[2], self.buf6[3])
self._accel._ivector[2] = bytes_toint(self.buf6[4], self.buf6[5])
# Gyro
@property
def gyro(self):
'''
Gyroscope object
'''
return self._gyro
def _gyro_callback(self):
'''
Update gyroscope Vector3d object
'''
try:
self._read(self.buf6, 0x43, self.mpu_addr)
except OSError:
raise MPUException(self._I2Cerror)
self._gyro._ivector[0] = bytes_toint(self.buf6[0], self.buf6[1])
self._gyro._ivector[1] = bytes_toint(self.buf6[2], self.buf6[3])
self._gyro._ivector[2] = bytes_toint(self.buf6[4], self.buf6[5])
scale = (131, 65.5, 32.8, 16.4)
self._gyro._vector[0] = self._gyro._ivector[0]/scale[self.gyro_range]
self._gyro._vector[1] = self._gyro._ivector[1]/scale[self.gyro_range]
self._gyro._vector[2] = self._gyro._ivector[2]/scale[self.gyro_range]
def get_gyro_irq(self):
'''
For use in interrupt handlers. Sets self._gyro._ivector[] to signed
unscaled integer gyro values. Error trapping disallowed.
'''
self._read(self.buf6, 0x43, self.mpu_addr)
self._gyro._ivector[0] = bytes_toint(self.buf6[0], self.buf6[1])
self._gyro._ivector[1] = bytes_toint(self.buf6[2], self.buf6[3])
self._gyro._ivector[2] = bytes_toint(self.buf6[4], self.buf6[5])
This library also imports:
from vector3d import Vector3d
Here is the vector3d.py library code exactly as required by imu.py:
# vector3d.py 3D vector class for use in inertial measurement unit drivers
# Authors Peter Hinch, Sebastian Plamauer
# V0.7 17th May 2017 pyb replaced with utime
# V0.6 18th June 2015
'''
The MIT License (MIT)
Copyright (c) 2014 Sebastian Plamauer, oeplse@gmail.com, Peter Hinch
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
'''
from utime import sleep_ms
from math import sqrt, degrees, acos, atan2
def default_wait():
'''
delay of 50 ms
'''
sleep_ms(50)
class Vector3d(object):
'''
Represents a vector in a 3D space using Cartesian coordinates.
Internally uses sensor relative coordinates.
Returns vehicle-relative x, y and z values.
'''
def __init__(self, transposition, scaling, update_function):
self._vector = [0, 0, 0]
self._ivector = [0, 0, 0]
self.cal = (0, 0, 0)
self.argcheck(transposition, "Transposition")
self.argcheck(scaling, "Scaling")
if set(transposition) != {0, 1, 2}:
raise ValueError('Transpose indices must be unique and in range 0-2')
self._scale = scaling
self._transpose = transposition
self.update = update_function
def argcheck(self, arg, name):
'''
checks if arguments are of correct length
'''
if len(arg) != 3 or not (type(arg) is list or type(arg) is tuple):
raise ValueError(name + ' must be a 3 element list or tuple')
def calibrate(self, stopfunc, waitfunc=default_wait):
'''
calibration routine, sets cal
'''
self.update()
maxvec = self._vector[:] # Initialise max and min lists with current values
minvec = self._vector[:]
while not stopfunc():
waitfunc()
self.update()
maxvec = list(map(max, maxvec, self._vector))
minvec = list(map(min, minvec, self._vector))
self.cal = tuple(map(lambda a, b: (a + b)/2, maxvec, minvec))
@property
def _calvector(self):
'''
Vector adjusted for calibration offsets
'''
return list(map(lambda val, offset: val - offset, self._vector, self.cal))
@property
def x(self): # Corrected, vehicle relative floating point values
self.update()
return self._calvector[self._transpose[0]] * self._scale[0]
@property
def y(self):
self.update()
return self._calvector[self._transpose[1]] * self._scale[1]
@property
def z(self):
self.update()
return self._calvector[self._transpose[2]] * self._scale[2]
@property
def xyz(self):
self.update()
return (self._calvector[self._transpose[0]] * self._scale[0],
self._calvector[self._transpose[1]] * self._scale[1],
self._calvector[self._transpose[2]] * self._scale[2])
@property
def magnitude(self):
x, y, z = self.xyz # All measurements must correspond to the same instant
return sqrt(x**2 + y**2 + z**2)
@property
def inclination(self):
x, y, z = self.xyz
return degrees(acos(z / sqrt(x**2 + y**2 + z**2)))
@property
def elevation(self):
return 90 - self.inclination
@property
def azimuth(self):
x, y, z = self.xyz
return degrees(atan2(y, x))
# Raw uncorrected integer values from sensor
@property
def ix(self):
return self._ivector[0]
@property
def iy(self):
return self._ivector[1]
@property
def iz(self):
return self._ivector[2]
@property
def ixyz(self):
return self._ivector
@property
def transpose(self):
return tuple(self._transpose)
@property
def scale(self):
return tuple(self._scale)
For this tutorial, copy both files onto your Pico:
imu.pyvector3d.py
Example 1 - Read Acceleration and Gyroscope Values
from imu import MPU6050
from machine import I2C, Pin
import time
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
mpu = MPU6050(i2c)
while True:
print("Acceleration -> X:", mpu.accel.x, "Y:", mpu.accel.y, "Z:", mpu.accel.z)
print("Gyroscope -> X:", mpu.gyro.x, "Y:", mpu.gyro.y, "Z:", mpu.gyro.z)
print("------------------------------")
time.sleep(0.2)
Code Explanation
Import the modules
from imu import MPU6050
from machine import I2C, Pin
import time
MPU6050 is the sensor driver. I2C and Pin are used to configure the Pico hardware. time is used to slow the loop down so the serial output is easier to read.
Set up the I2C connection
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
This creates an I2C connection using:
- bus
1 GP6forSDAGP7forSCL400000Hz I2C speed
Create the sensor object
mpu = MPU6050(i2c)
This connects the MicroPython driver to the MPU-6050 module.
Read the accelerometer values
print("Acceleration -> X:", mpu.accel.x, "Y:", mpu.accel.y, "Z:", mpu.accel.z)
This prints the acceleration values with clearer labels for the:
xaxisyaxiszaxis
As you tilt or move the sensor, these values change.
Read the gyroscope values
print("Gyroscope -> X:", mpu.gyro.x, "Y:", mpu.gyro.y, "Z:", mpu.gyro.z)
This prints the gyroscope values for rotation on each axis with easier-to-read labels.
These values help detect turning, spinning, or other rotational movement.
Slow down the loop
time.sleep(0.2)
The small delay makes the serial output easier to read and reduces how often the code polls the sensor.
Example 2 - Detect Tilt
Once you can read the axis values, a simple next step is to detect tilt direction.
from imu import MPU6050
from machine import I2C, Pin
import time
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
mpu = MPU6050(i2c)
while True:
x = mpu.accel.x
y = mpu.accel.y
if x > 0.5:
print("Tilted right")
elif x < -0.5:
print("Tilted left")
elif y > 0.5:
print("Tilted forward")
elif y < -0.5:
print("Tilted backward")
else:
print("Level")
time.sleep(0.2)
Common Problems
Nothing prints
- check the
SDAandSCLwiring - make sure the module is powered
- confirm the
imu.pydriver file is on the Pico
The values look wrong
Small changes and drift are normal. Motion sensors are sensitive, and readings may need filtering or calibration in more advanced projects.
I2C device not found
- double-check the I2C pins
- verify the sensor address and driver match your module
- try an I2C scan if needed
Summary
The MPU-6050 is a very useful sensor when you want to detect movement, tilt, or rotation with a Raspberry Pi Pico.
With just a few wires and an I2C driver, you can read:
- acceleration on three axes
- rotation on three axes
That makes it a strong choice for interactive electronics and motion-based projects.